01
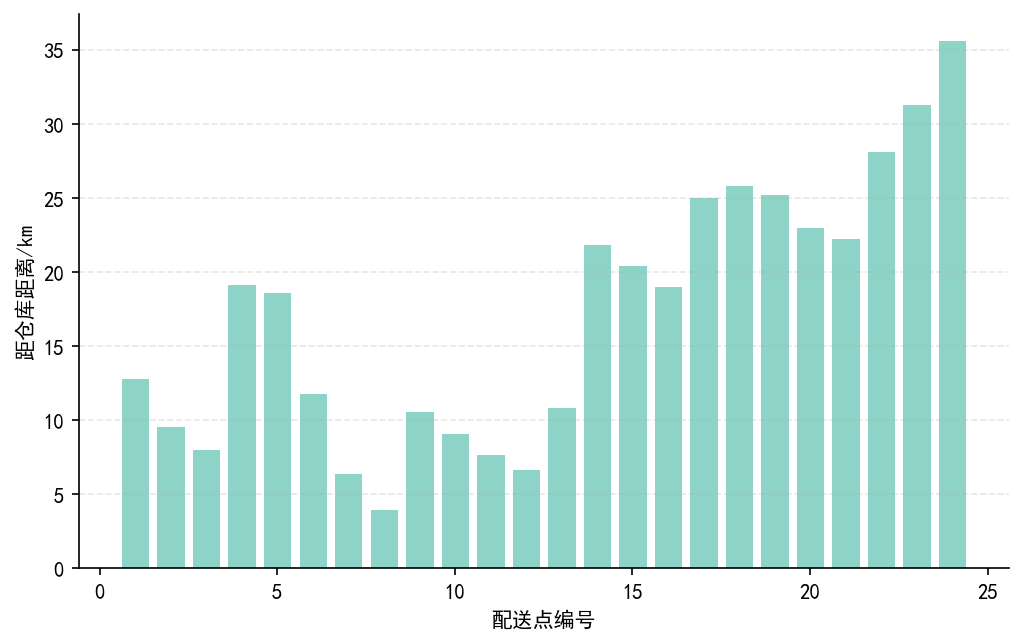
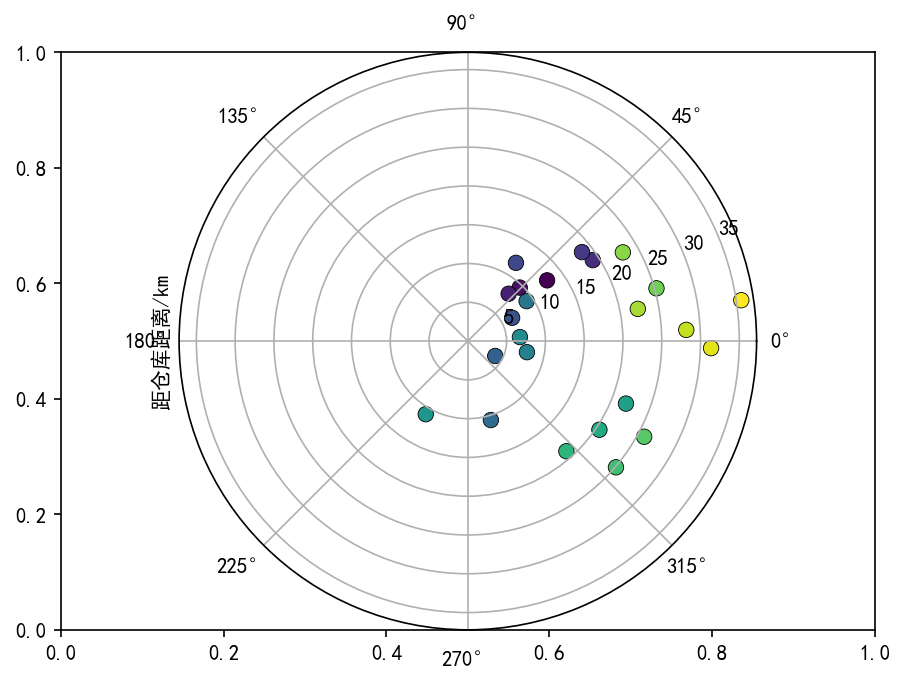
距离底座
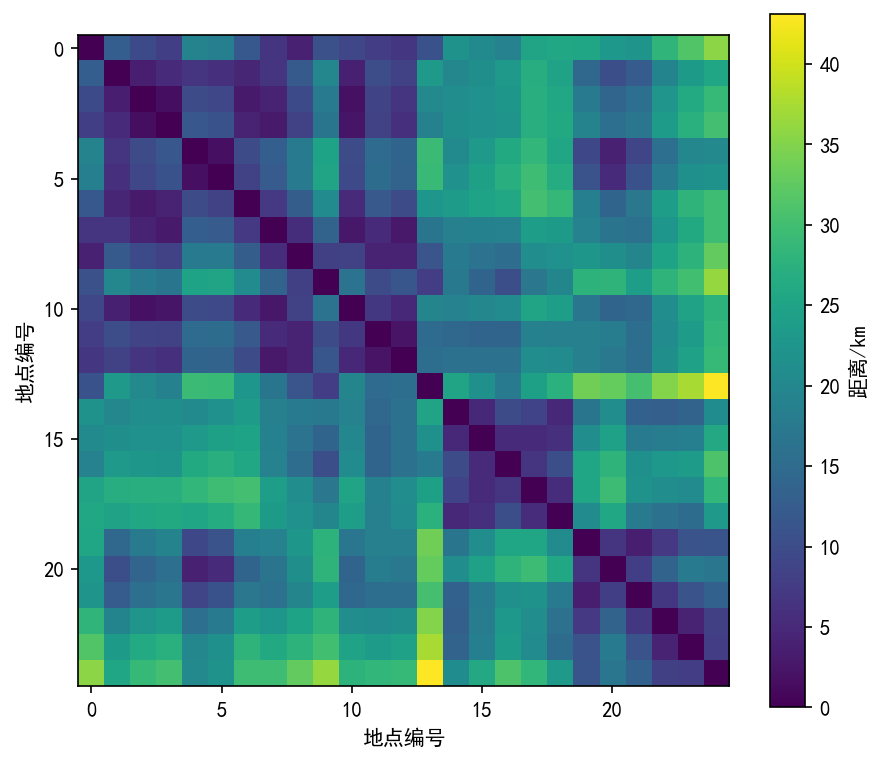
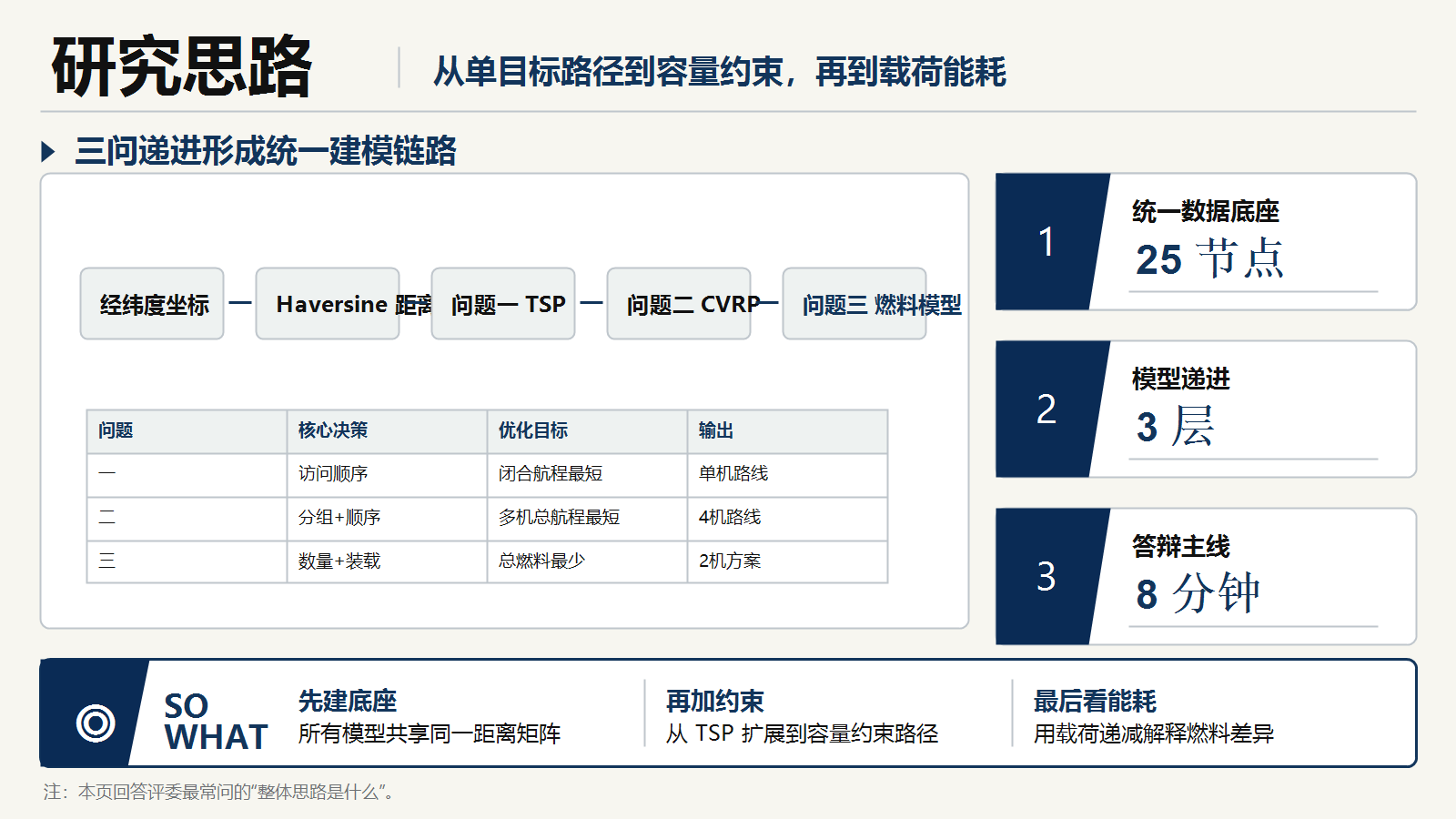
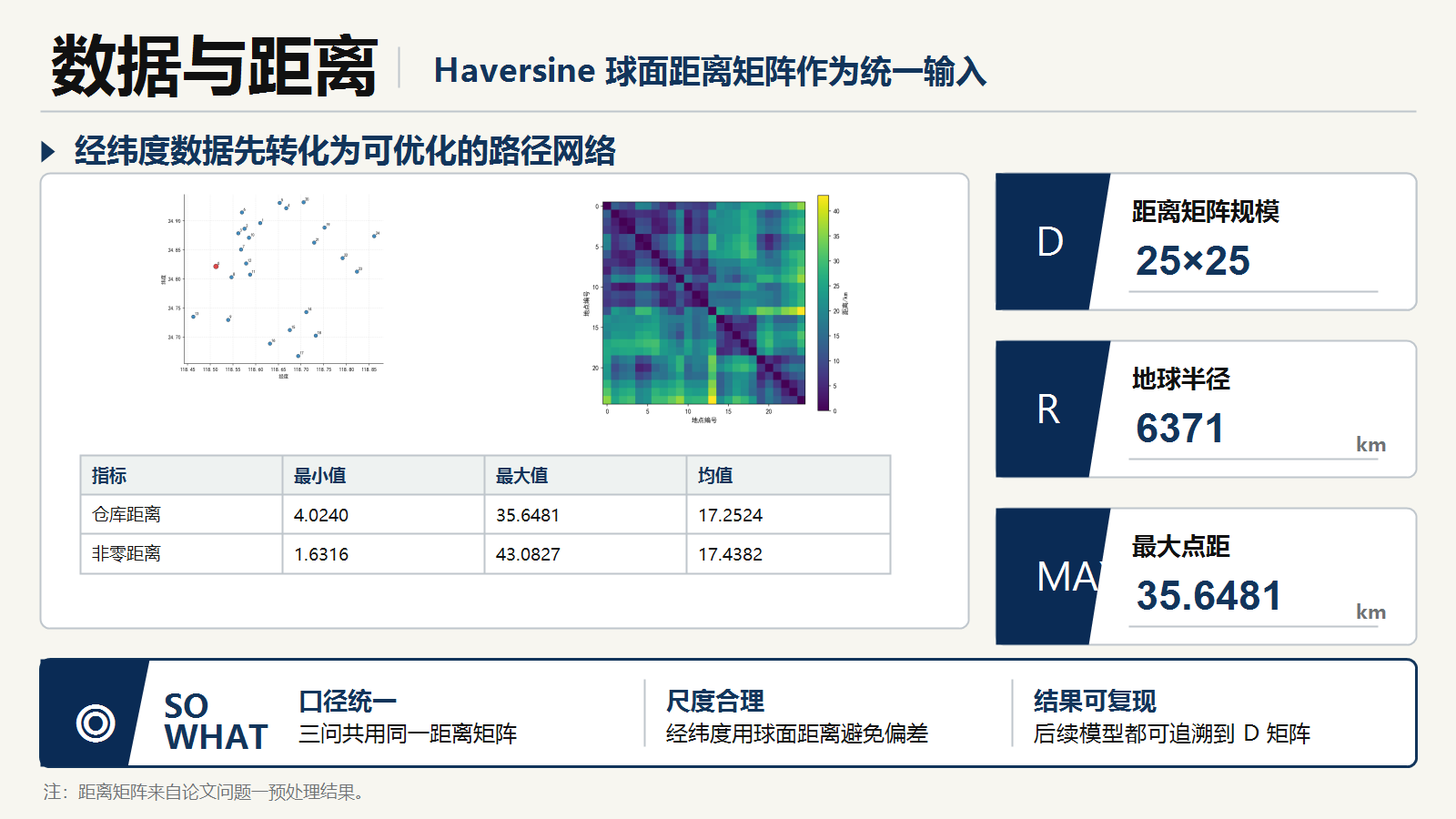
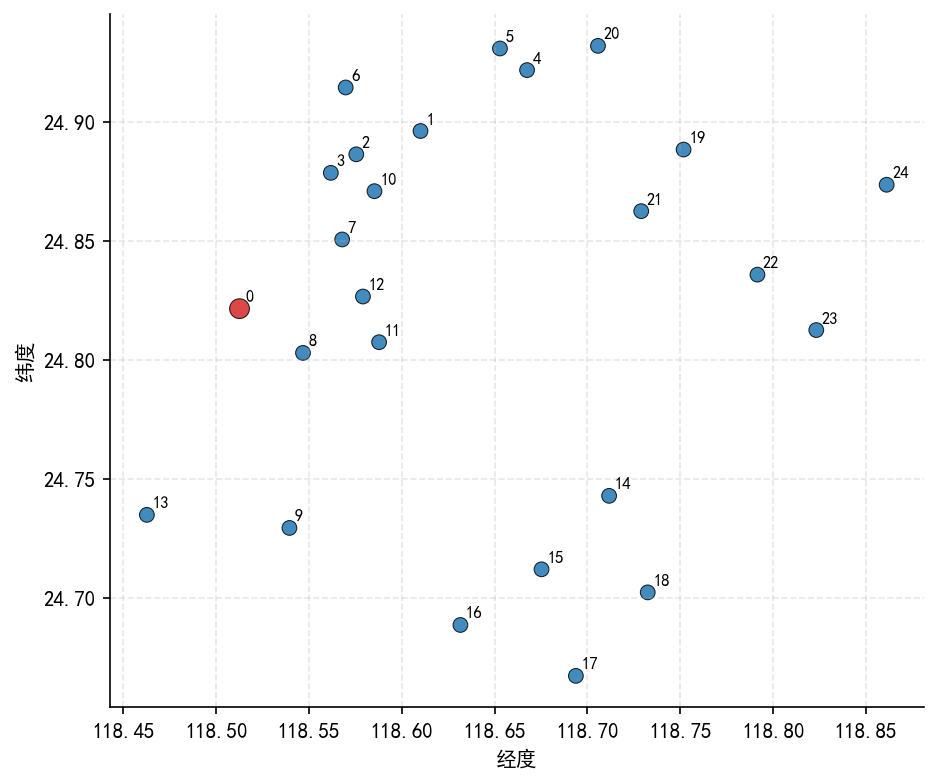
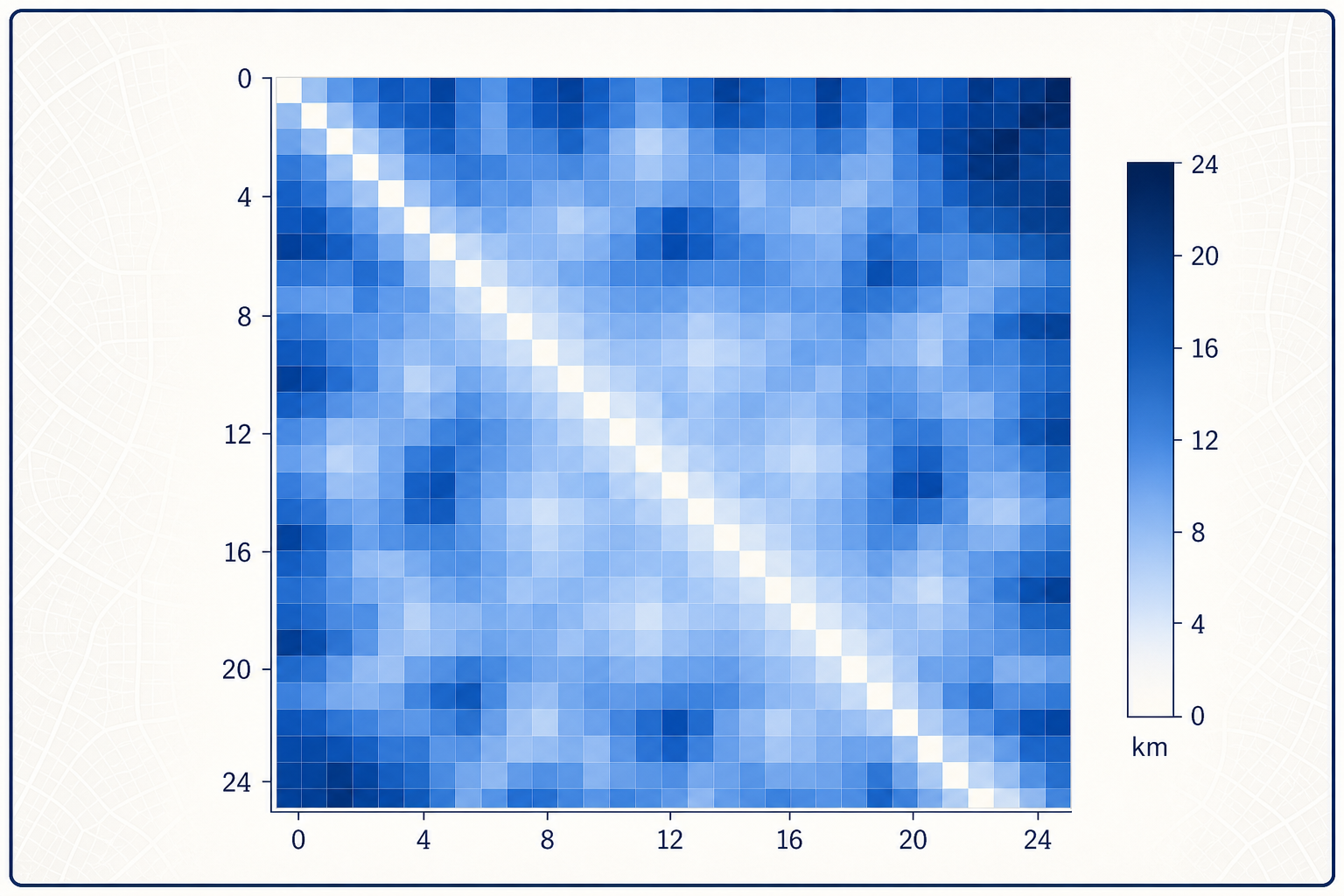
用 Haversine 公式构建球面距离矩阵,避免经纬度点位直接套欧氏距离造成尺度偏差。
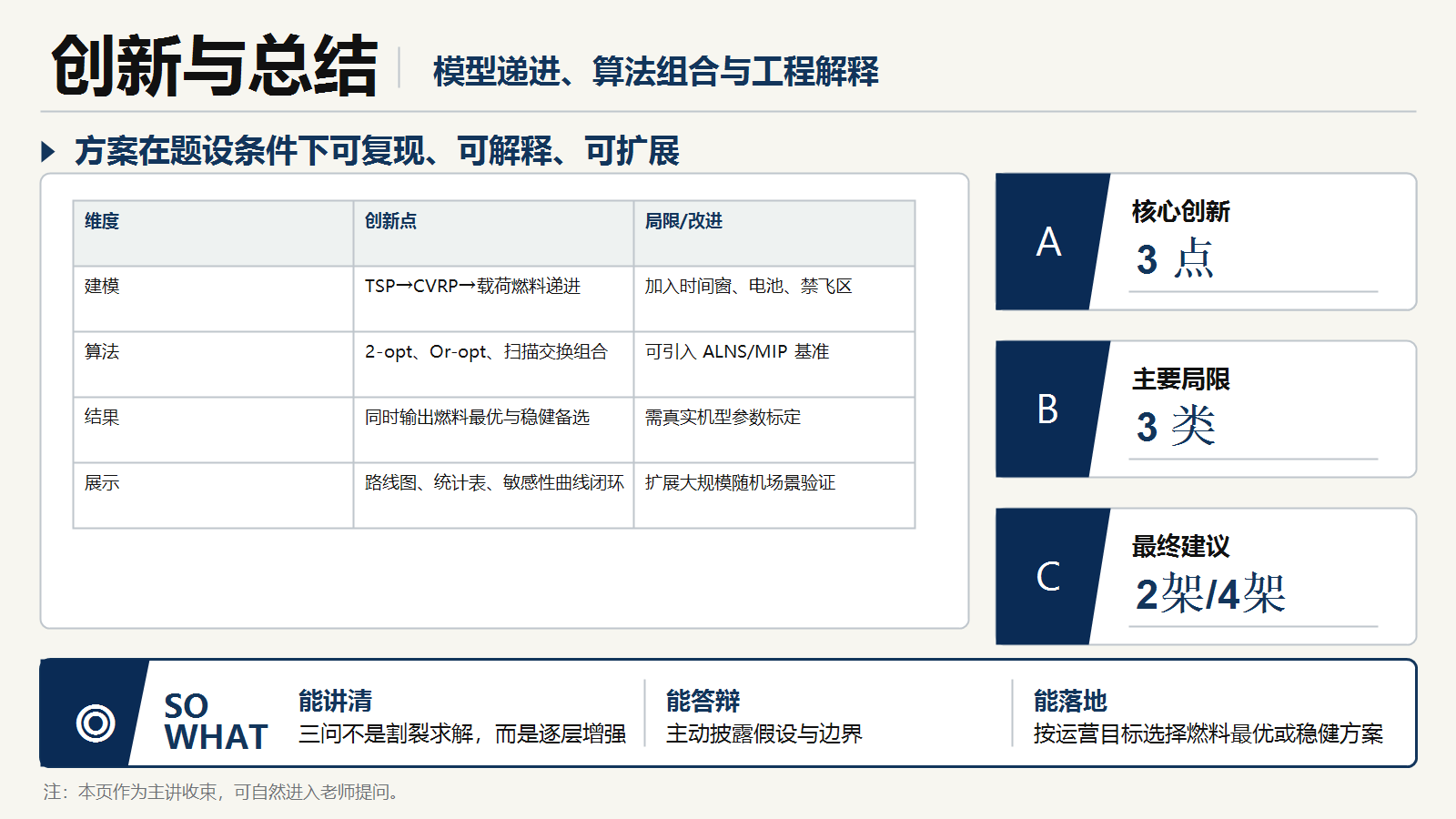
从单机最短航程,到容量约束下的四机协同,再到载荷相关燃料最小化。这个展示页把论文核心结论、答辩 PPT 视觉与生成路线图串成一条可讲解的故事线。
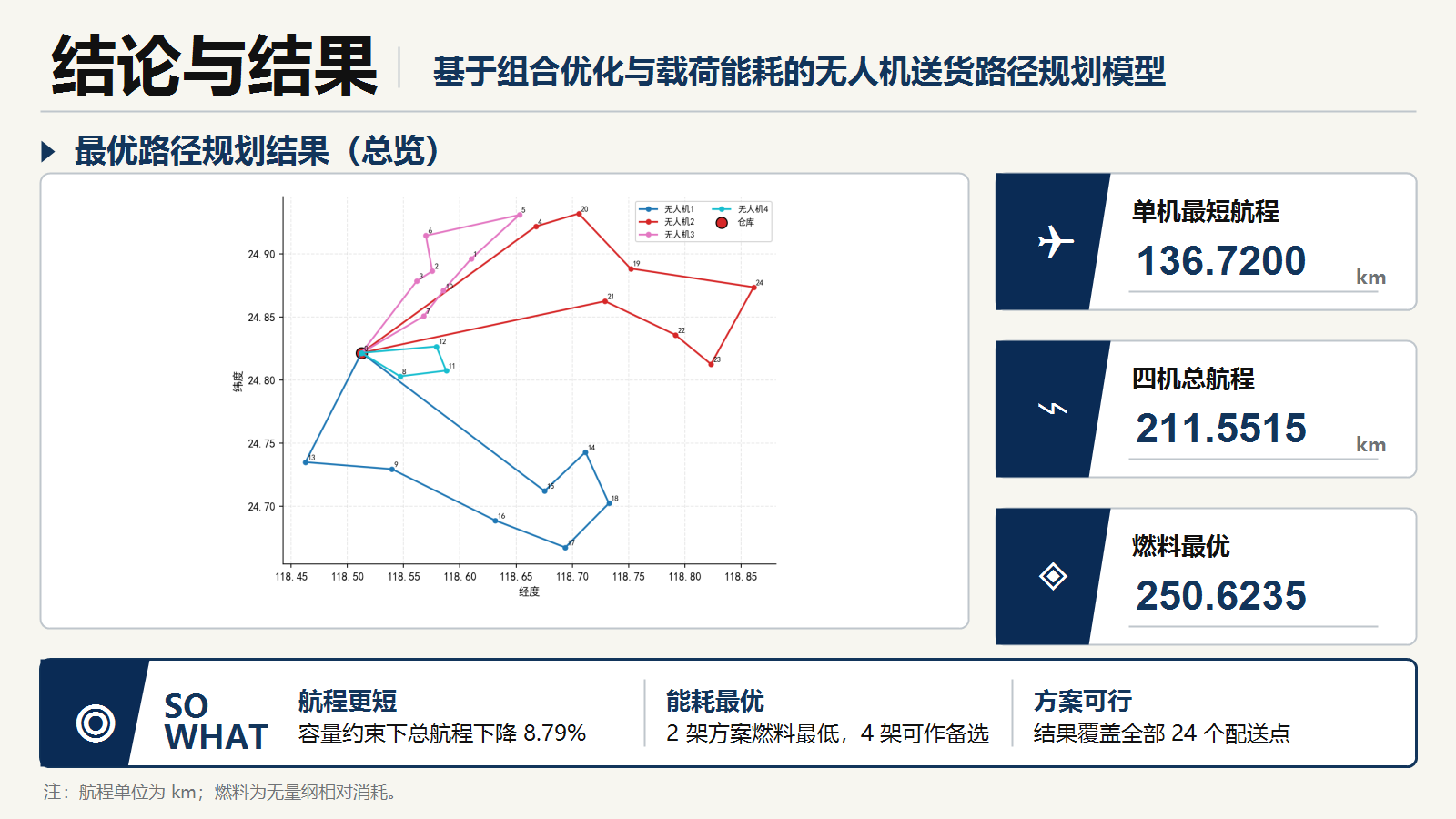
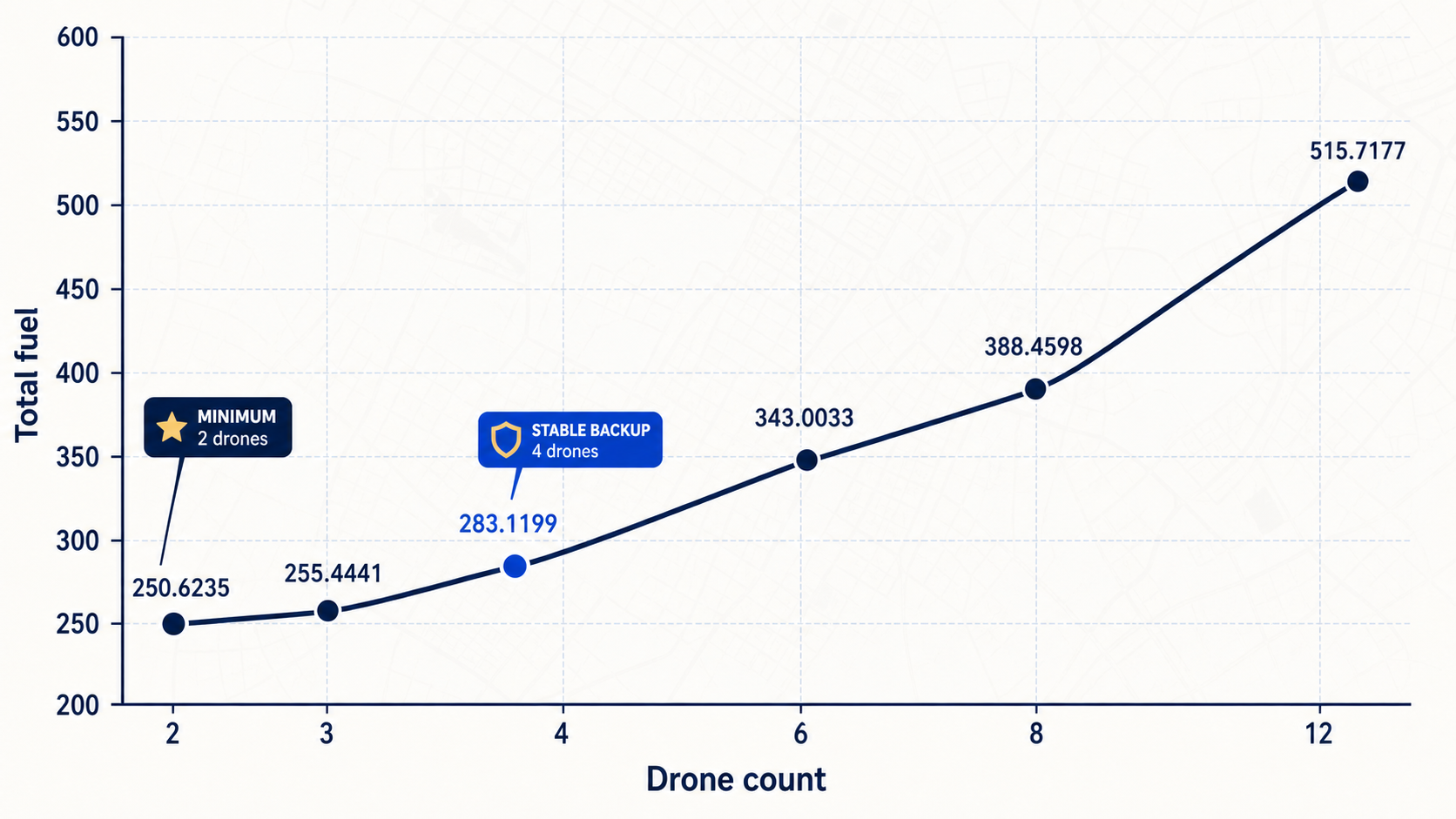
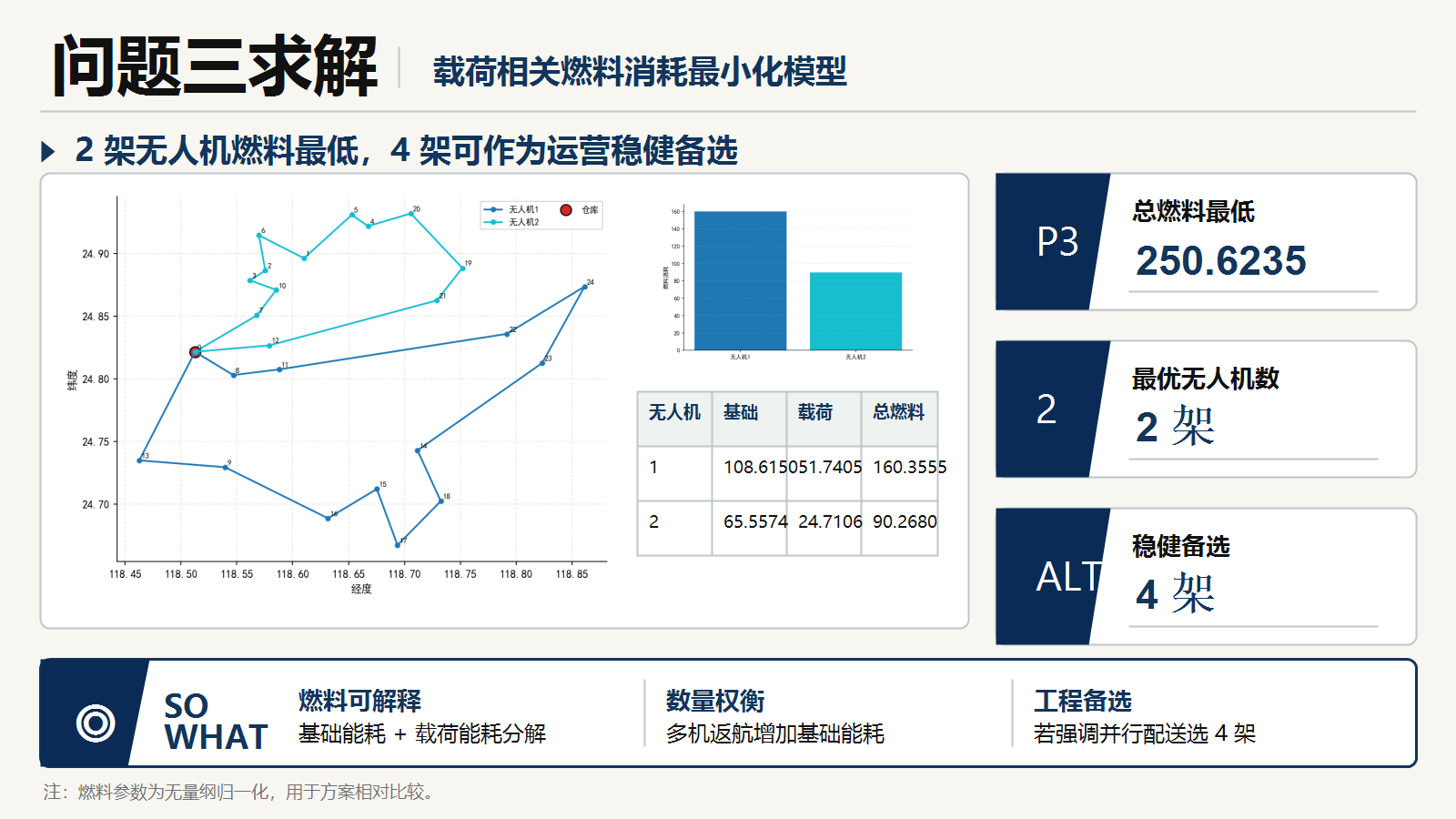
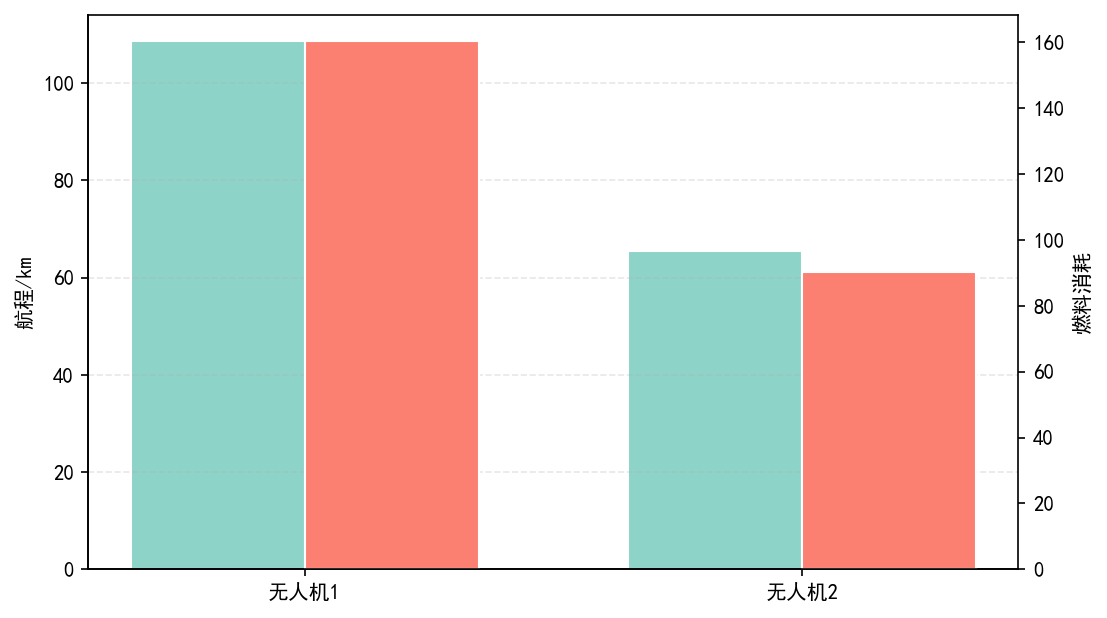
容量约束下,总航程较初始扫描方案下降 8.79%;燃料目标下,两架无人机最优,四架方案可作为运营冗余备选。
论文三问不是孤立计算,而是在同一套经纬度距离底座上逐步加约束:先求最短闭合路线,再处理多机容量,最后把目标升级为载荷相关燃料消耗。
用 Haversine 公式构建球面距离矩阵,避免经纬度点位直接套欧氏距离造成尺度偏差。
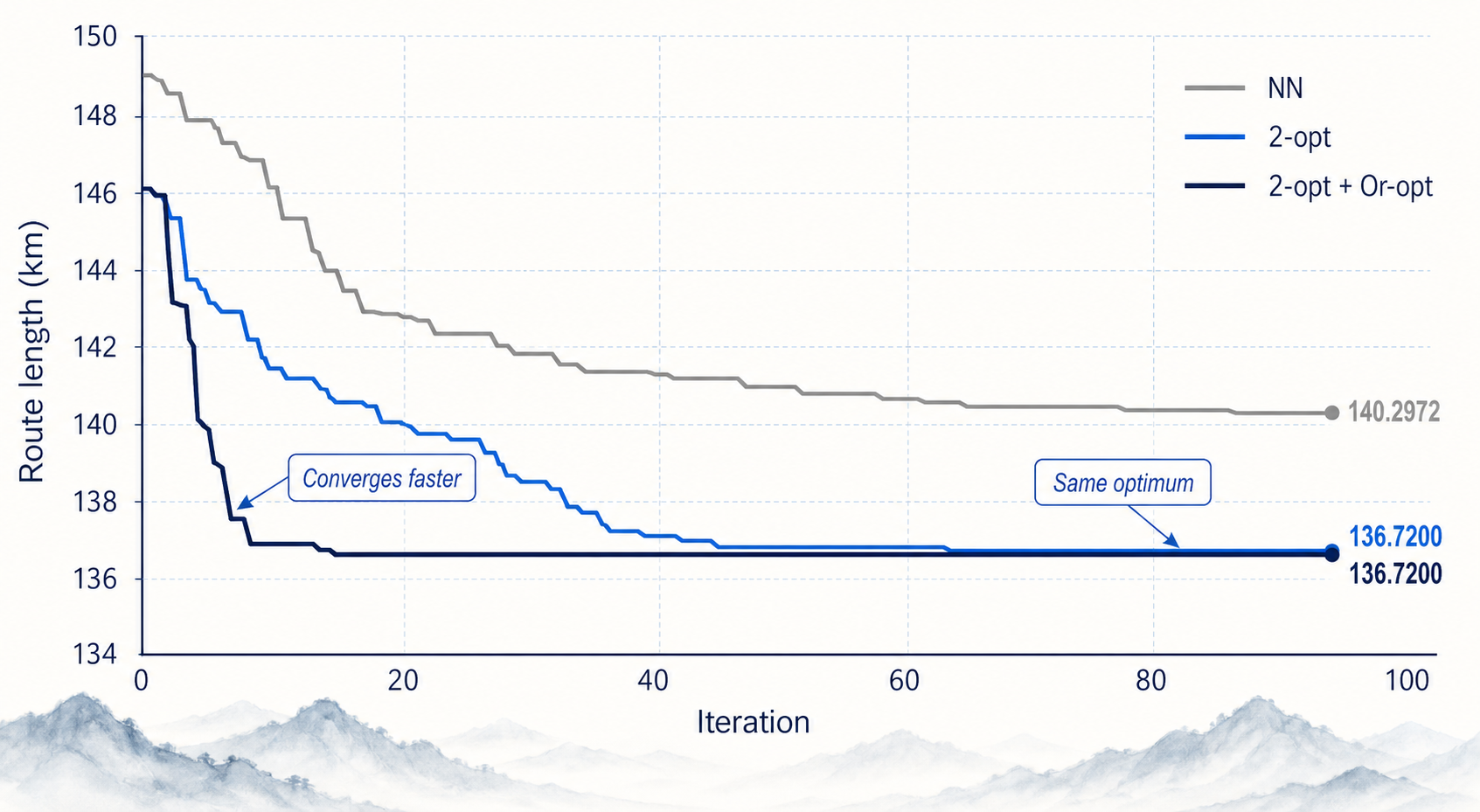
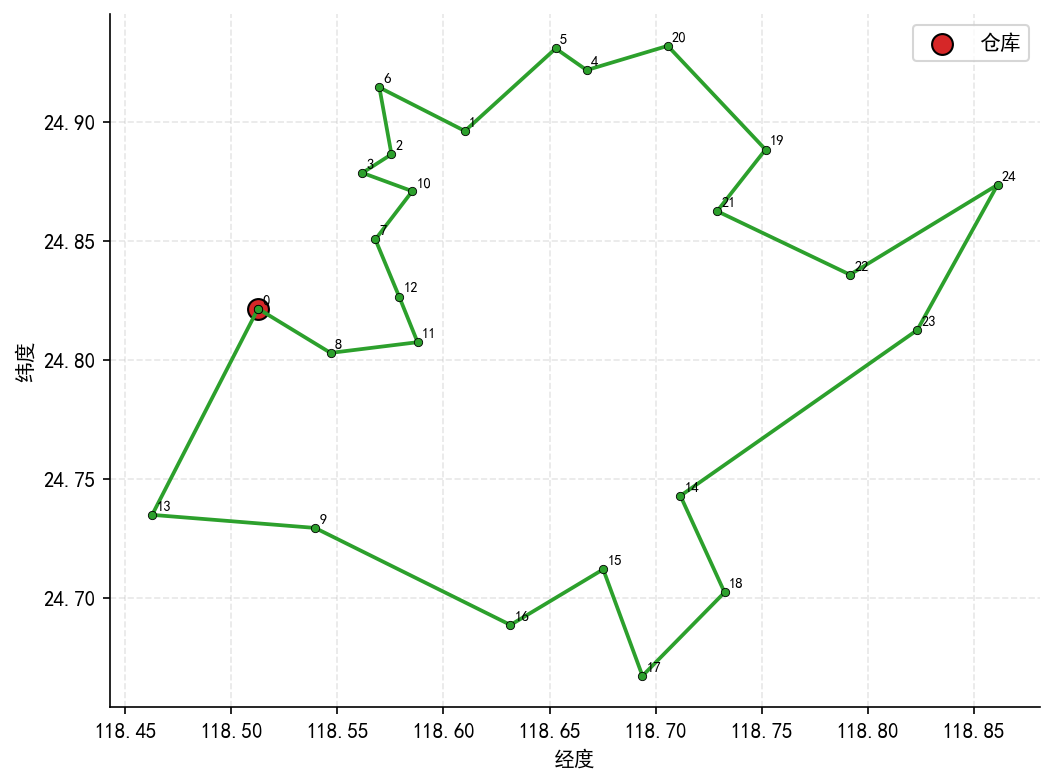
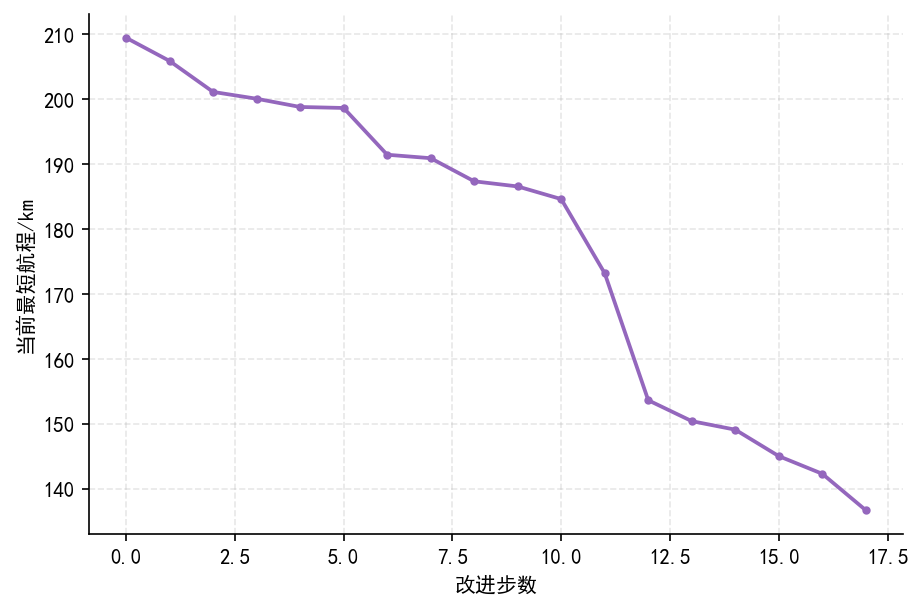
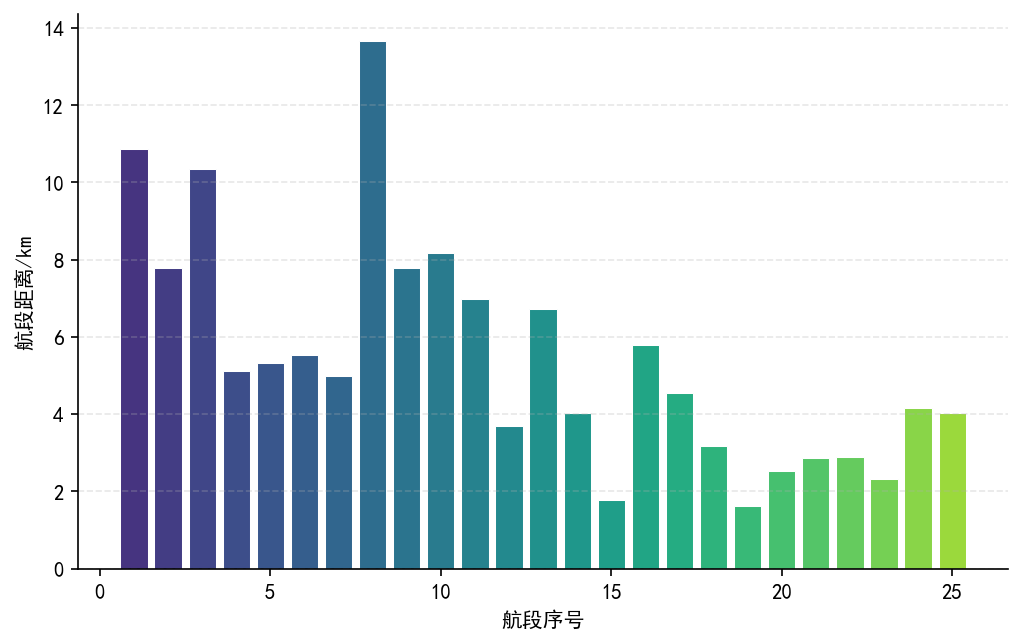
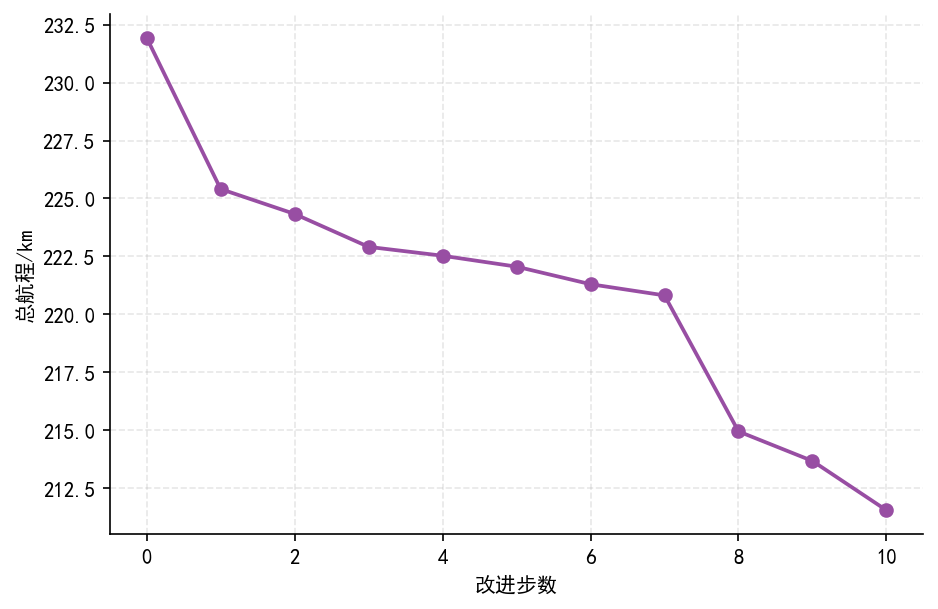
以访问序列为决策变量,结合多起点最近邻、2-opt、Or-opt 与随机重启,得到 136.7200 km 的闭合路线。
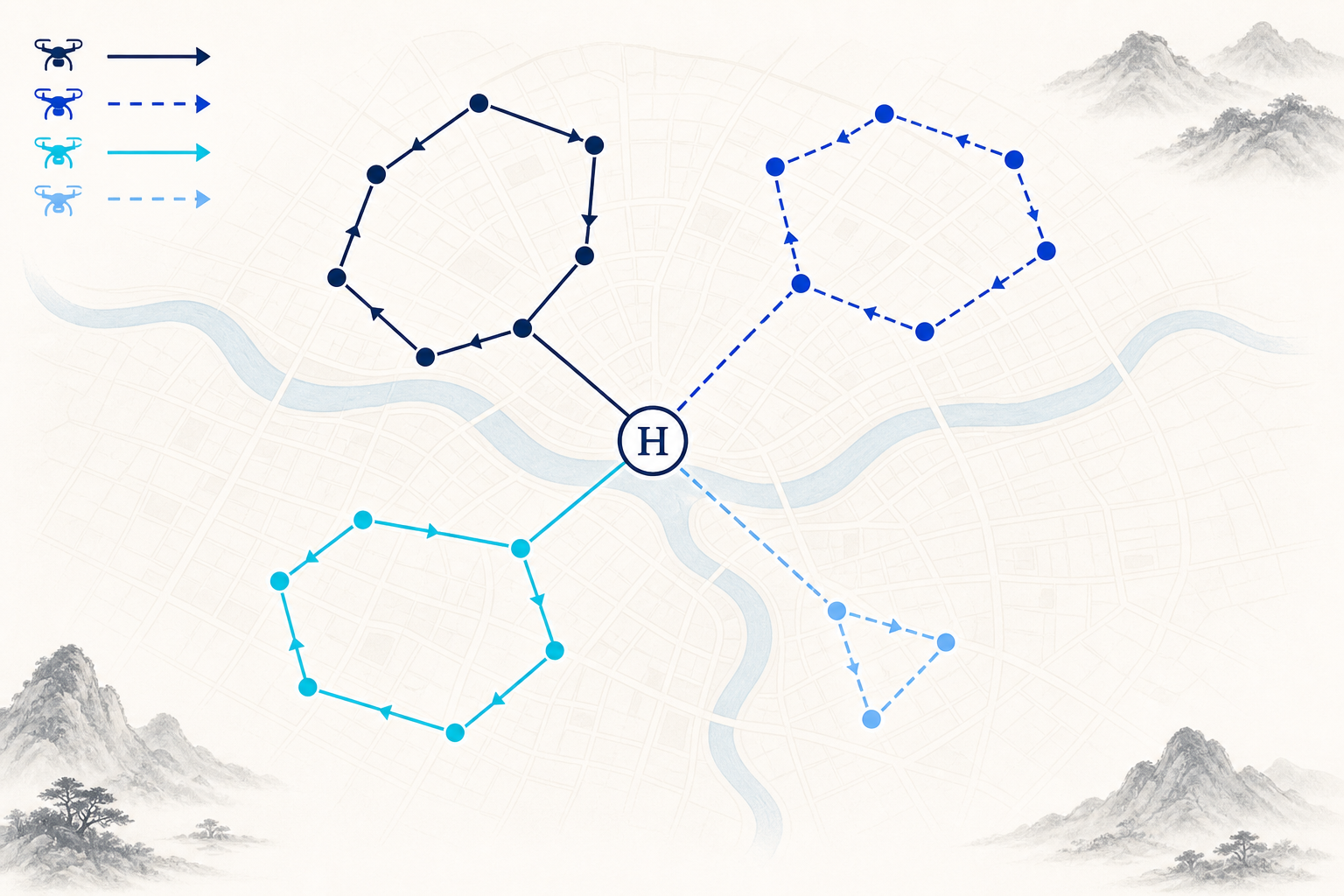
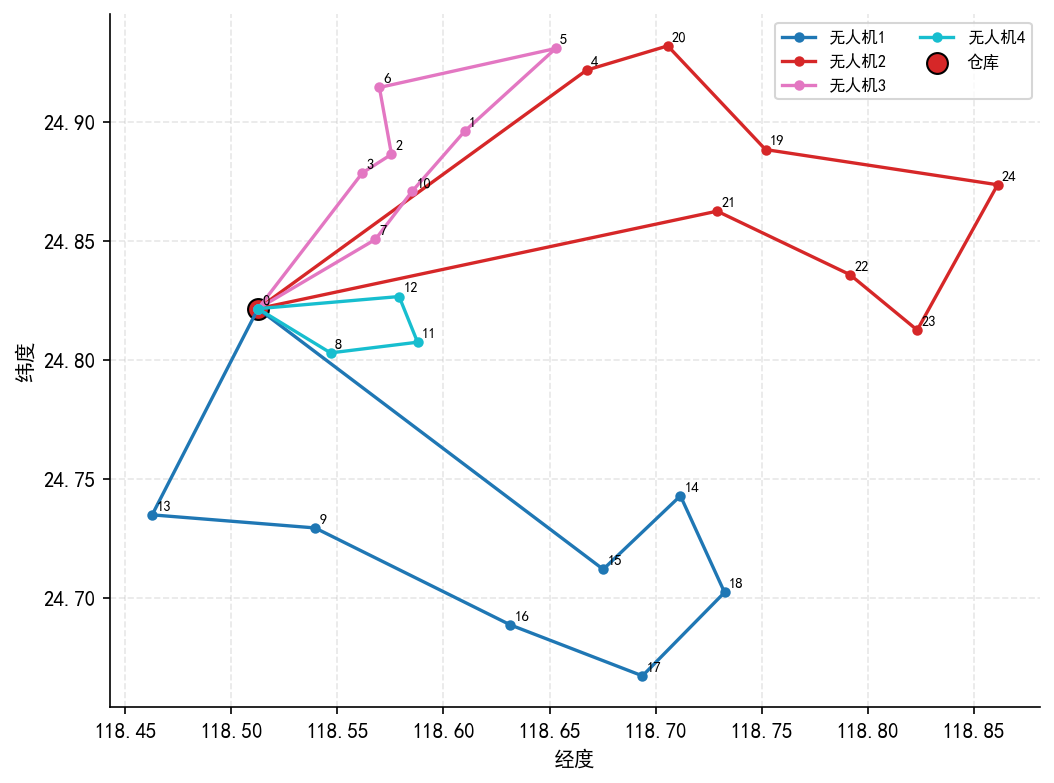
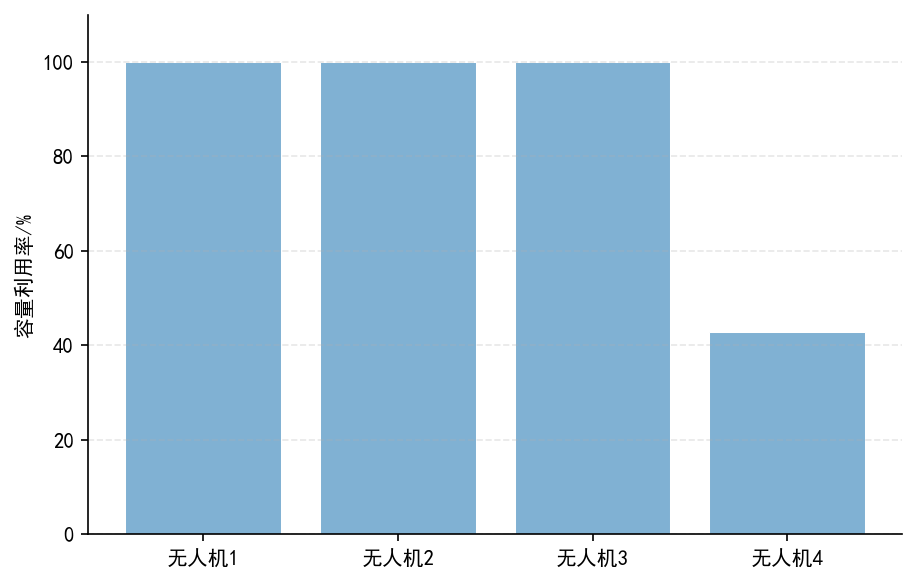
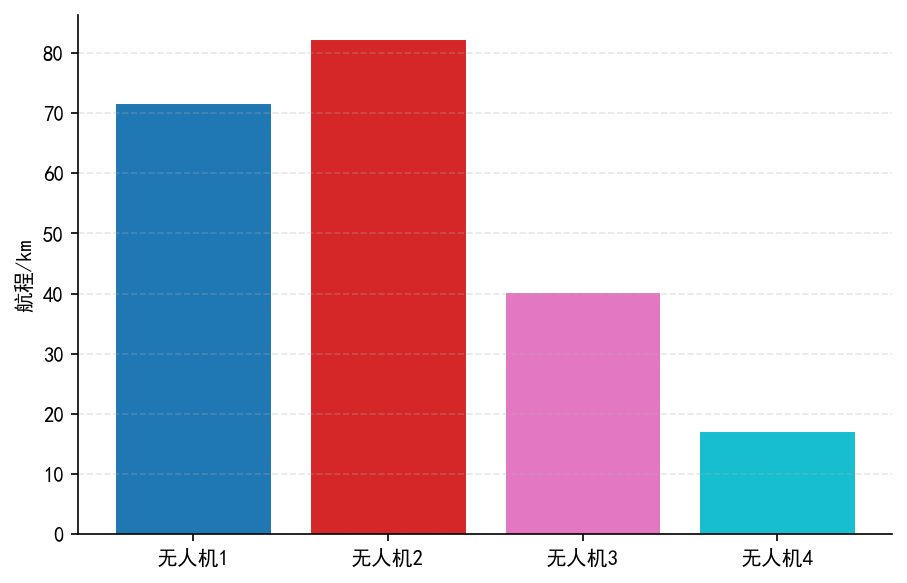
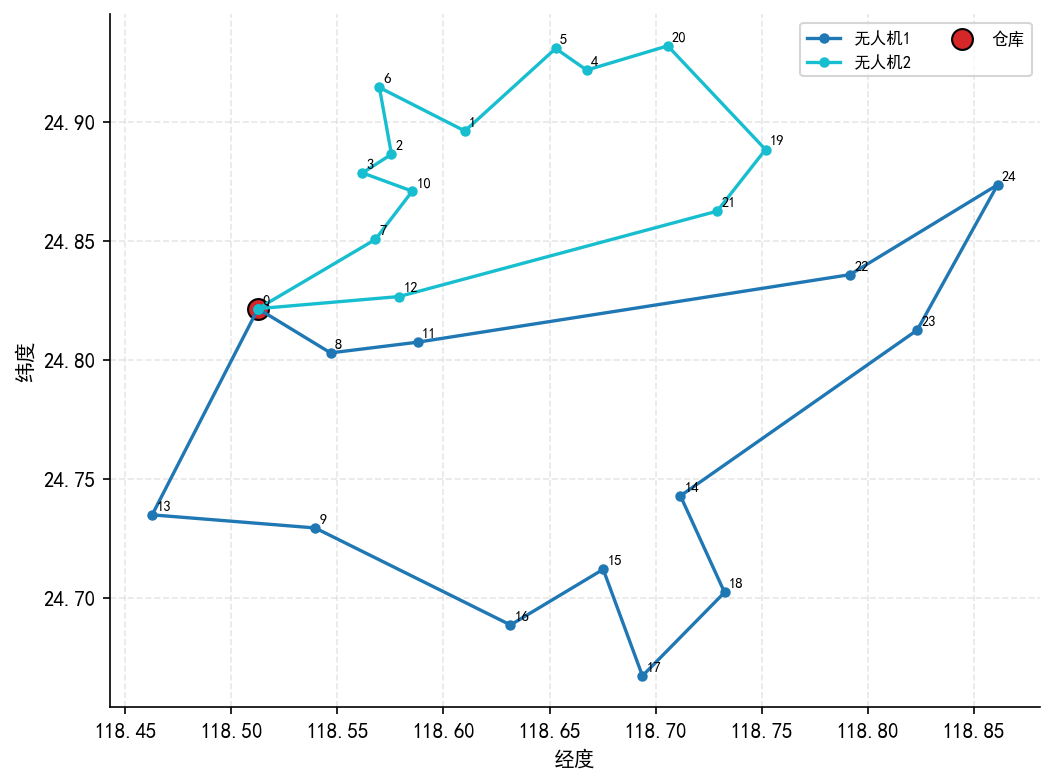
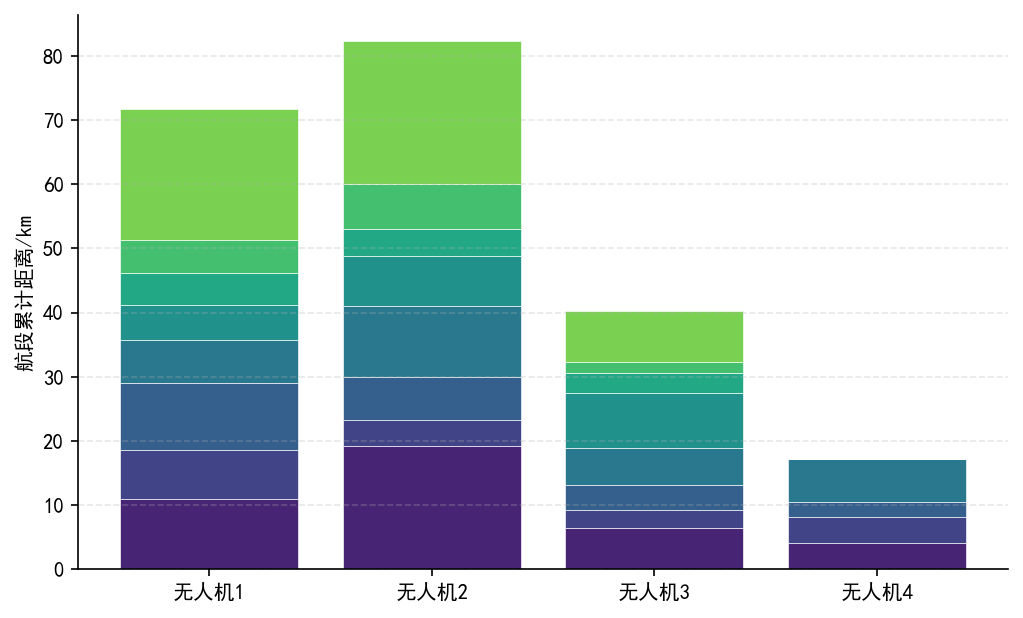
加入“每架最多 7 个目的地”的容量限制,采用方位角扫描分组和跨组交换,形成四机可行方案。
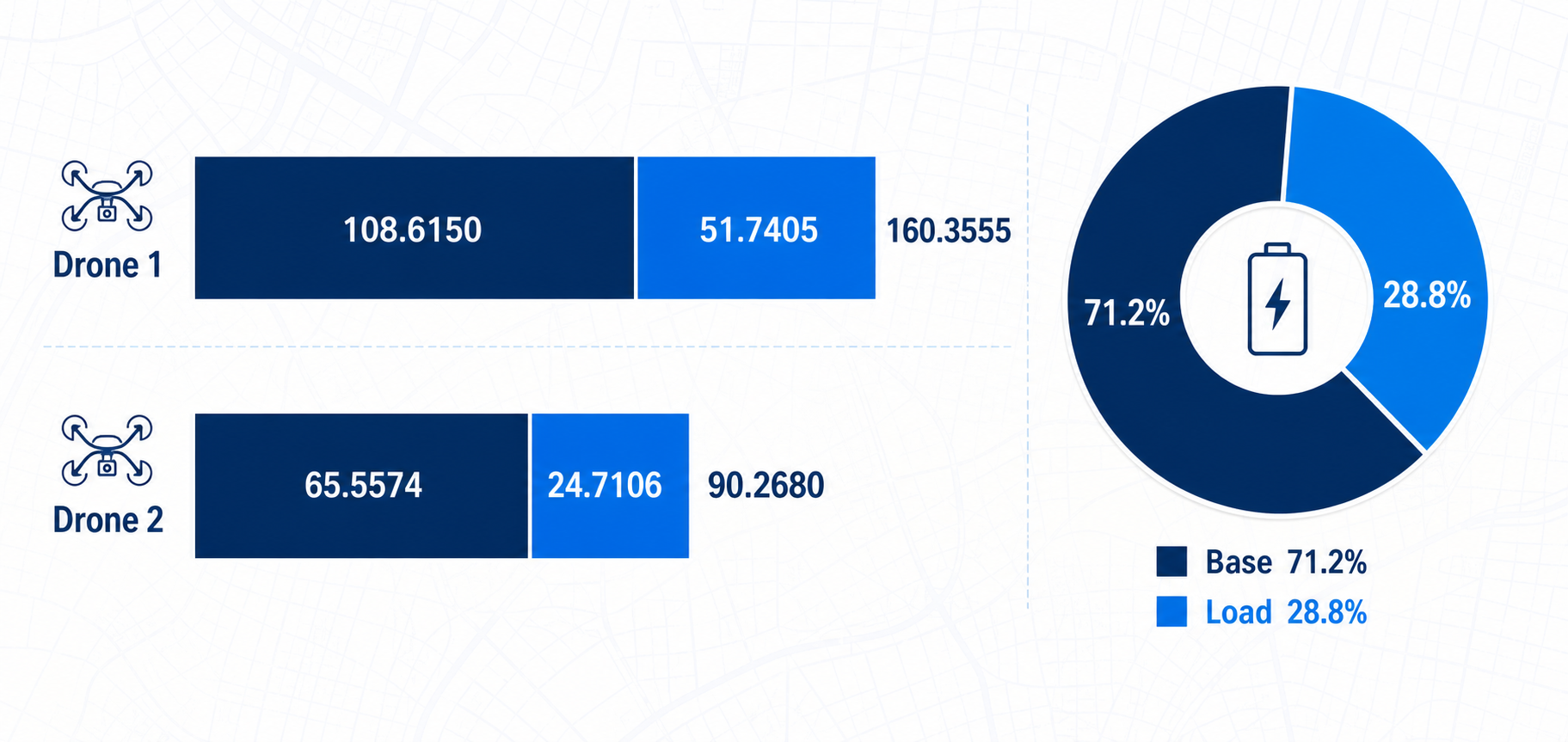
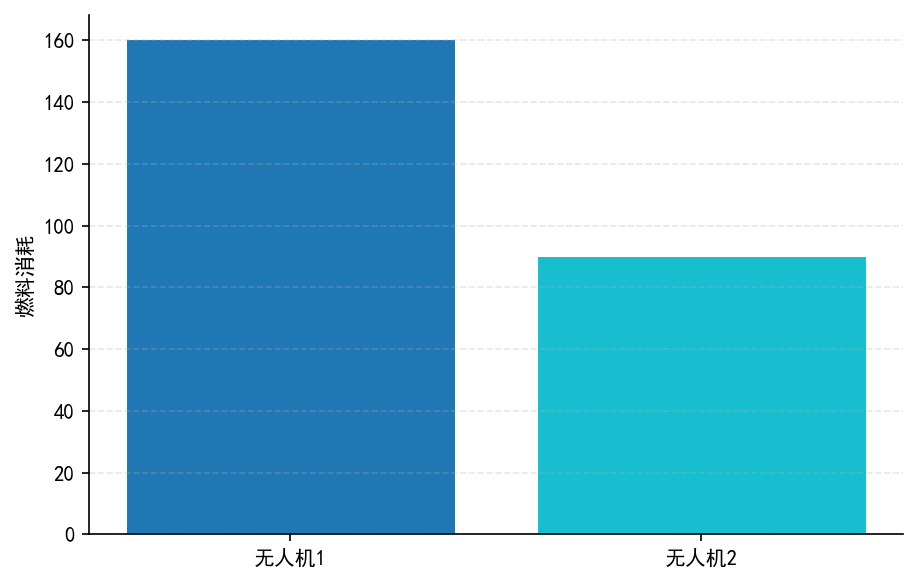
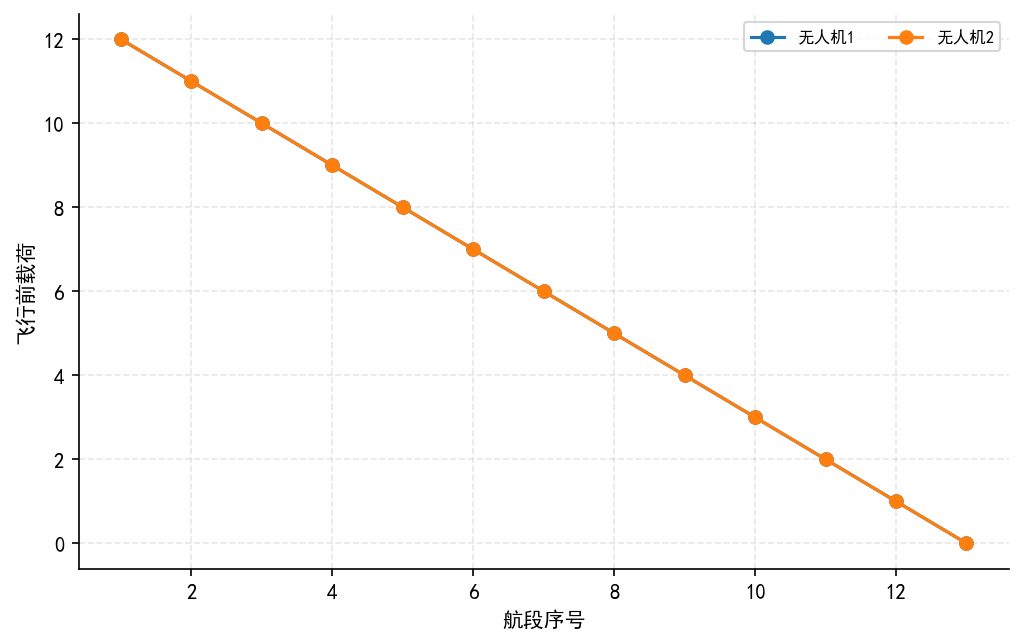
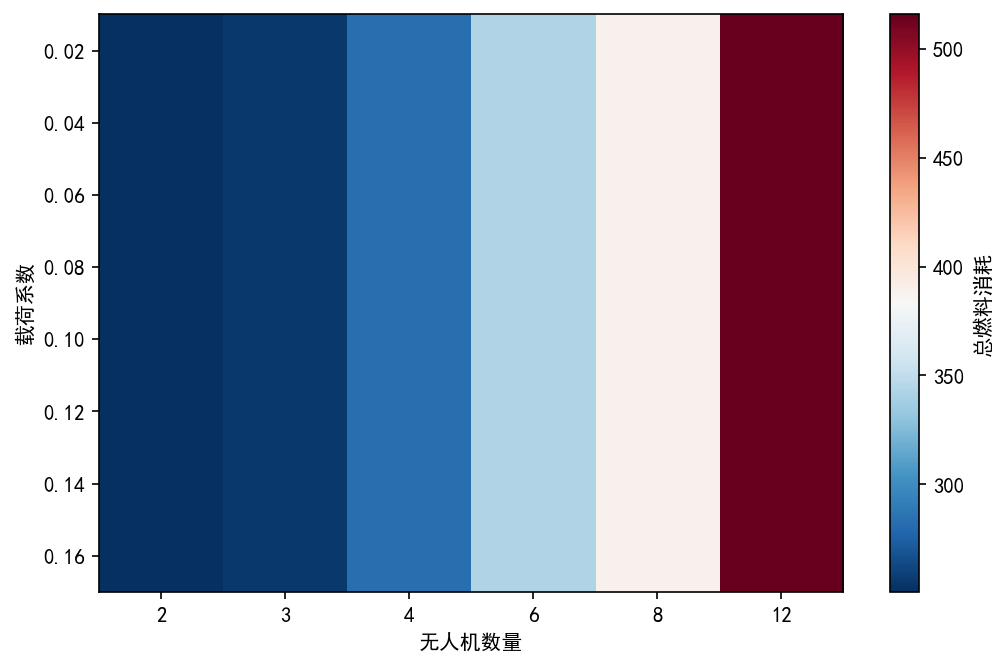
燃料由基础能耗与剩余载荷线性叠加,比较不同无人机数量下的等装载方案,并做灵敏度检验。
页面主色延续答辩 PPT 的深蓝、米白和强调色;首屏与图表区则吸收生成图中的“水墨地图 + 科技路线”质感,形成更适合浏览器滚动观看的展陈效果。
| 无人机 | 服务点 | 点数 | 航程 |
|---|---|---|---|
| 1 | 13, 9, 16, 17, 18, 14, 15 | 7 | 71.7191 |
| 2 | 4, 20, 19, 24, 23, 22, 21 | 7 | 82.2879 |
| 3 | 7, 10, 1, 5, 6, 2, 3 | 7 | 40.3084 |
| 4 | 8, 11, 12 | 3 | 17.2361 |
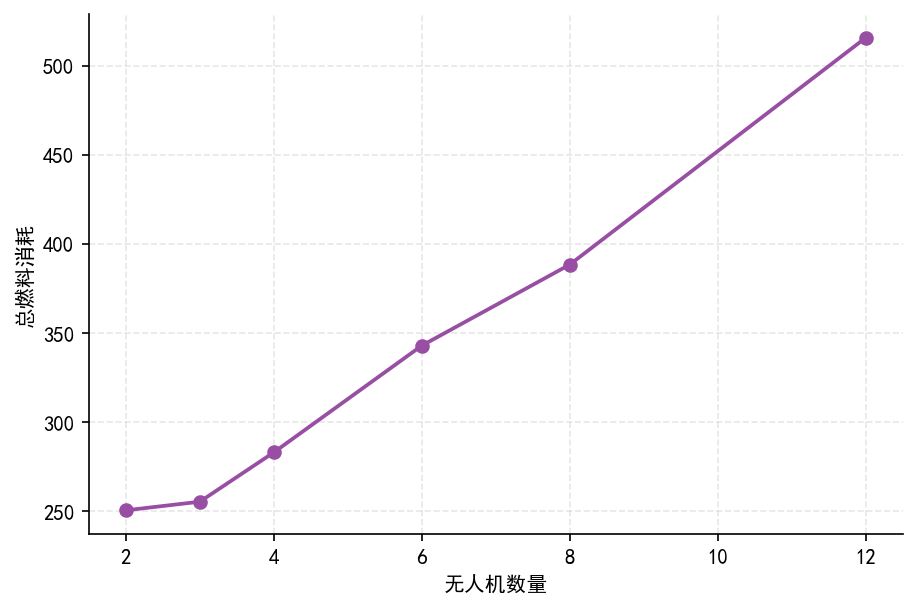
| 无人机数量 | 每机包裹数 | 总燃料 | 总航程 | 判断 |
|---|---|---|---|---|
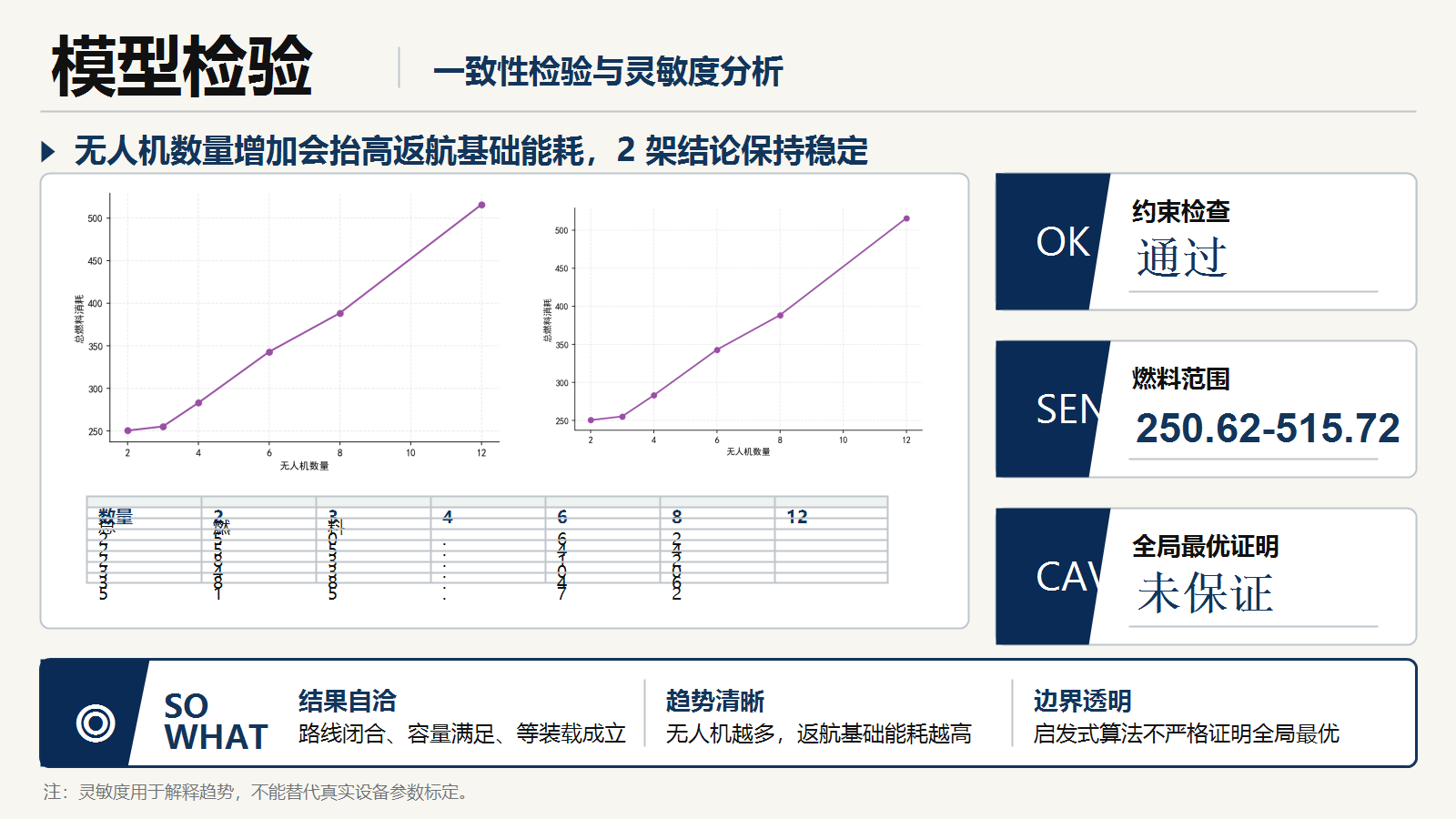
| 2 | 12 | 250.6235 | 174.1724 | 最优方案 |
| 3 | 8 | 255.4441 | 198.8512 | 接近最优 |
| 4 | 6 | 283.1199 | 237.8437 | 稳健备选 |
| 6 | 4 | 343.0033 | 301.0198 | 返航增多 |
| 8 | 3 | 388.4598 | 351.0337 | 返航增多 |
| 12 | 2 | 515.7177 | 480.7106 | 燃料最高 |
这里展示的是现有 PPT 导出的页面缩略图。网页沿用了它的结论先行、深蓝信息卡、白底学术图表和“SO WHAT”总结方式。


图表均来自求解脚本或生成图素材。点击任意图表可放大预览;筛选按钮用于快速聚焦对应问题。

检验重点不是声称全局最优,而是证明结果自洽:路线闭合、容量可行、燃料模型确实包含载荷项,且主要结论在参数扰动下保持稳定。
最近邻、2-opt、Or-opt 和随机重启均在同一距离矩阵上运行,最终最短航程稳定为 136.7200 km。
四架无人机服务点数量为 7、7、7、3,均未超过容量上限,且总航程较初始方案下降 8.79%。
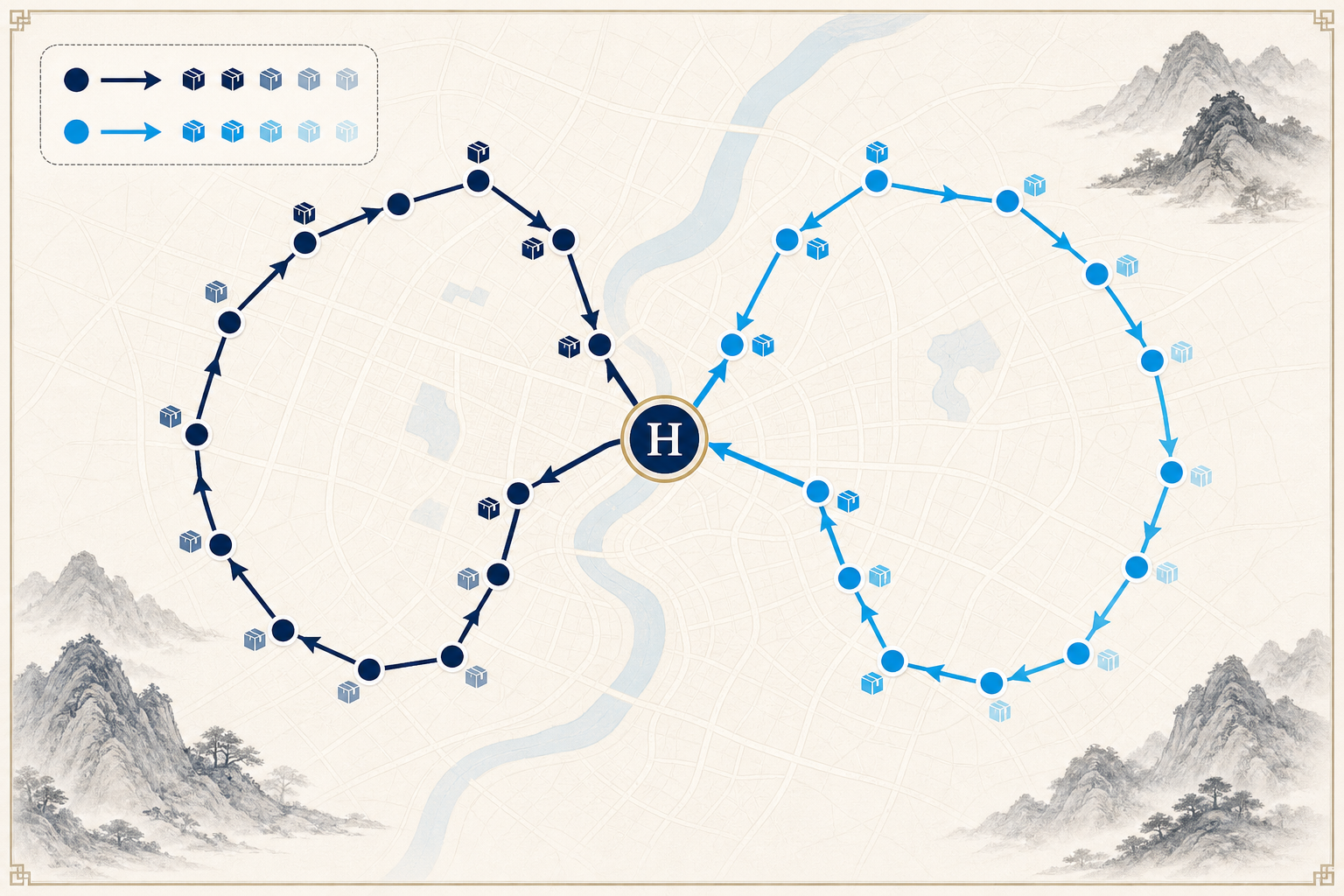
两架方案满足等装载,燃料拆分为基础能耗与载荷能耗,说明第三问不是简单的距离最短。
无人机数量增加时往返基础能耗提高;2 架方案保持最优或近最优,4 架可作为运营冗余方案。
本文为无人机配送调度提供了一套从路径规划到燃料解释的完整建模链条:若目标是燃料最小,2 架等装载方案最优;若强调运营冗余和并行配送能力,4 架等载方案更稳健。